Image – Courtesy of the MIT Researchers
Researchers from MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) have created a robot capable of altering its appearance and abilities by changing exoskeletons. This design is a departure from traditional thinking in robotics, in which robots are built to perform one task or suit one particular purpose. This robot, known as “Primer,” has the ability to adopt the form best suited to a given task.
The paper is published in Science Robotics.
The project was led by Daniela Rus, the Andrew and Erna Viterbi Professor of Electrical Engineering and Computer Science and director of CSAIL, and Shuhei Miyashita, a former CSAIL postdoctoral research associate who is now a lecturer in intelligent robotics at the University of York in the UK.
“Robots – and especially rigid-bodied robots, like the kinds you see in movies – are generally pretty inflexible, since most of the time each of their parts has a fixed structure and a single defined purpose,” said Miyashita. “This means that they can’t easily be developed to achieve different types of tasks.”
The research team saw this inflexibility as a hindrance to the field of robotics and sought to change it.
“We’ve been able to develop a basic robot body with fine-tuned ‘super-suits’ (exoskeletons) that it can pick up and drop off for different tasks,” Miyashita said.
Having one robot that can perform a number of functions is vastly more efficient than building multiple robots, each performing just one function.
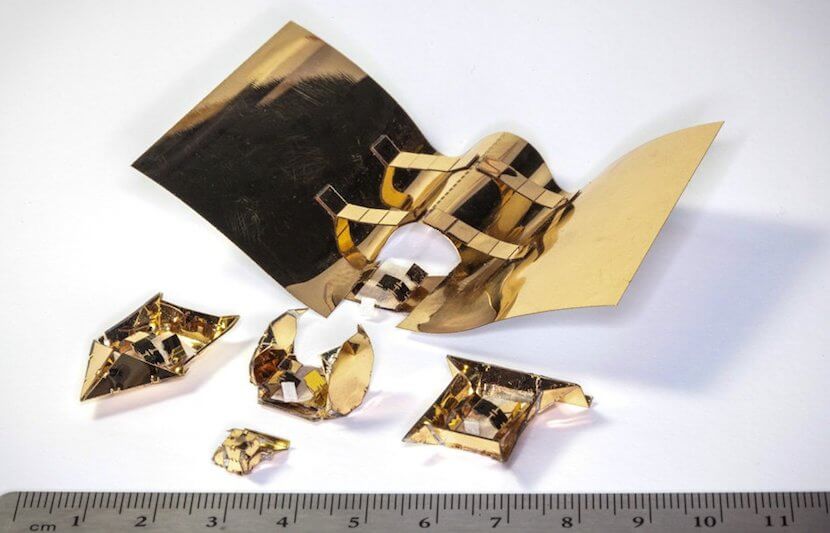
Without any exoskeletons, Primer has the appearance of a gold sugar cube. By donning its various exoskeletons, it can walk, roll, sail, and glide. Its movement is controlled via magnets, and its exoskeletons come in the form of sheets of plastic which, when heated, fold up around Primer. Once the task is accomplished, Primer sheds it exoskeleton by immersing itself in water.
“We’d like to make robots with exoskeletons at different scales to support applications that range from the car with changeable body to the mini-surgeon capable of incision-free procedures and more intelligent, and potentially use different types of biomaterials so that it can do more long-term operations,” said Miyashita.
The creation of versatile robots, such as Primer, suggests that in the future, as opposed to having multiple robots designed to carry out singular functions, we will have single robots capable of carrying out multiple functions.
Miyashita foresees two immediate roles for robots such as Primer. The first is in medicine.
The research team has had success in developing robots for medical work. Last year, the team created a tiny origami robot that could be swallowed and remotely operated to repair tears in a patient’s stomach lining.
“Our approach shows that origami-inspired manufacturing allows us to have robotic components that are versatile, accessible, and reusable,” said Rus in a statement.
A combination of an origami robot and one such as Primer could lead to more advanced uses for robots in medicine.
“With this new approach, you could imagine being able to swallow a basic cube robot to do one task – deliver a drug, for example – and then swallow additional robots that can be magnetically controlled to combine with the robot to do other things, like patch wounds or perform simple surgeries,” said Miyashita.
The second use for flexible robots such as Primer is in automobile construction.
“Another possibility in the future would be to use this approach for cars,” Miyashita said. “For example, imagine having a smaller robotic unit that could be your city car that can fit into tight parking spaces, and then adding an exoskeleton that gives it enough space to hold a couple of bikes! It’s exciting to think that a robot could serve as a ‘Swiss army knife’ that could be used for a range of tasks depending on the different accessories it has.”
According to Miyashita, the team has no immediate plans for commercialization, but he hopes that other researchers will capitalize on the philosophy of Primer in order to make more efficient robots.
The research team also includes postdoctoral fellow Shuguang Li and graduate student Steven Guitron.

